Research
Research interest: Computer Vision, Robotics, Machine Learning.
Visual Tracking Benchmark
 |
For decades many visual trackers have been proposed, but there was little effort to quantitatively measure and compare their performance.
In this work we provide a dataset which contains common test videos with hand-labeled groundtruth.
The tracker library with standardized interface for massive evaluation enables the researchers to easily test and compare their trackers with the state-of-the-art trackers.
|
Yi Wu, Jongwoo Lim*, Ming-Hsuan Yang,
“Online Object Tracking: A Benchmark,”
in CVPR 2013,
[link]
[pdf]
[project page,
code]
Online Environment Mapping (Visual SLAM)
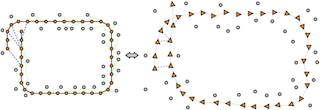 |
Building the map of environment for localization and navigation is critical for scene understanding and robot operation.
We propose a metric-topological mapping which holds the benefits of both metric maps and topological maps.
|
Jongwoo Lim*, Jan-Michael Frahm, Marc Pollefeys,
“Online Environment Mapping using Metric-topological Maps,”
in IJRR, Vol. 31 Issue 12, Page 1394-1408, October 2012
[link]
Camera Motion Estimation
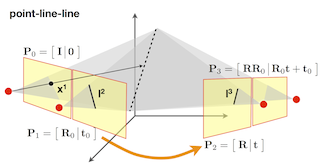 | 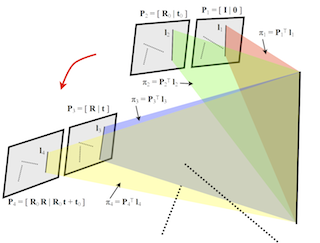 | Points are commonly used for structure from motion and ego-motion estimation. We investigated more robust and fast ways to use line features for motion estimation of a stereo camera rig. |
Vivek Pradeep, Jongwoo Lim,
“Egomotion Estimation Using Assorted Features,”
in IJCV, Vol. 98, Issue 2, Page 202-216, 2012
[link]
Manmohan Chandraker, Jongwoo Lim, David Kriegman,
“Moving in Stereo: Efficient Structure and Motion Using Lines,”
in ICCV 2009
[link]
[pdf]
* I am also currently working on visual tracking, scene understanding, and robot navigation.
Past Topics
Google Business Photos
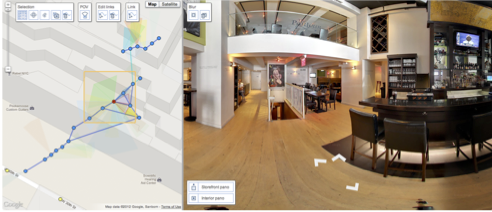 |
Googel Business Photos is a service which brings the StreetView inside of local businesses.
It requires automatic panorama stitching, panorama localization using structure from motion, and manual editing for misplaced panoramas.
|
Mark Colbert, Jean-Yves Bouguet, Jeff Beis, Spudde Childs, Daniel Filip, Luc Vincent, Jongwoo Lim, Scott Satkin,
“Building indoor multi-panorama experiences at scale,”
in ACM SIGGRAPH 2012 Talks, Article No. 24
[link]
Human Robot Interaction with ASIMO
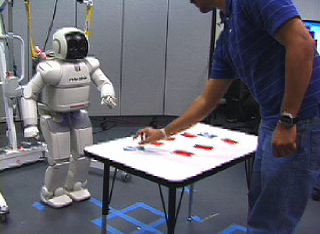 |
In Honda Research Institute USA, inc. I worked on a human-robot interaction project.
We built a system which makes ASIMO to play a memory game (card matching) with a child player.
All sensing is done using the onboard stereo camera.
|
Victor Ng-Thow-Hing, Jongwoo Lim, Joel Wormer, Ravi Kiran Sarvadevabhatla, Carlos Rocha, Kikuo Fujimura, Yoshiaki Sakagami,
“The memory game: Creating a human-robot interactive scenario for ASIMO,”
in IROS 2008, pp. 779-786
[link]
[pdf]
Incremental Visual Tracking
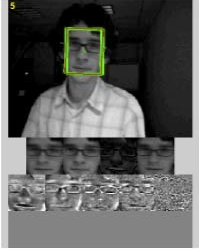 |  |  | The incremental subspace update algorithm with mean update is proposed in the paper. The simple but effective visual tracking algorithm is proposed which uses the incremental subspace update algorithm for appearance modeling and the particle filtering for motion estimation. |
David Ross, Jongwoo Lim, Ruei-Sung Lin, Ming-Hsuan Yang,
“Incremental Learning for Robust Visual Tracking,”
in IJCV, Vol. 77, No. 1-3, Pg. 125-141, May 2008
[link]
[pdf]
[project page]
Image Clustering
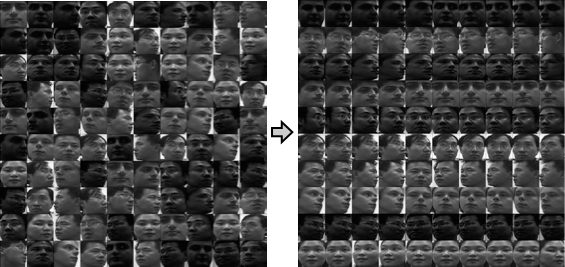 |
Image clustering is to group images according to the identity or class of the objects in the images.
Ideally the affinity measure must be insensitive to illumination variation or viewing direction changes in the images.
We have proposed a few affinity measures for this purpose, and a general framework for hypergraph approximation.
|
Sameer Agarwal, Jongwoo Lim, Lihi Zelnik-Manor, Pietro Perona, David Kriegman, Serge Belongie,
“Beyond Pairwise Clustering,”
in CVPR 2005, vol. 2, pp. 838-845
[link]
[abstract] [pdf]
Jongwoo Lim, Jeffrey Ho, Ming-Hsuan Yang, Kuang-Chih Lee, David Kriegman,
“Image Clustering with Metric, Local Linear Structure and Affinity Symmetry,”
in ECCV 2004, vol. 1, pp. 456-468
[link]
[abstract] [pdf]
Jeffrey Ho, Ming-Hsuan Yang, Jongwoo Lim, Kuang-Chih Lee, David Kriegman,
“Clustering Appearances of Objects Under Varying Illumination Conditions,”
in CVPR 2003, vol 1, pp. 11-18
[link]
[abstract] [pdf]
|
